ARA Advance Bot
ARA Advance Bot
Le dernier joint intégré améliore la vitesse du joint à 223°/s, ce qui est la plus élevée du secteur.
Cette amélioration permet un plus large éventail de scénarios d'application et augmente de 25 % le temps de cycle de production des tâches courantes comme la manutention.
Par conséquent, cela génère des avantages économiques plus importants.
Le bus EtherCAT est utilisé par le servomoteur commun, fournissant une large bande passante de plusieurs centaines de mégabits et une vitesse de réponse commune de l'ordre de la milliseconde. Cette combinaison remarquable améliore considérablement la vitesse de déplacement et la fluidité de la trajectoire du robot, lui permettant d'effectuer efficacement un large éventail de tâches.
Chaque robot est calibré avec précision avec un système d'étalonnage laser, garantissant une précision de positionnement absolue inférieure à 0,4 mm. Cette précision exceptionnelle permet au robot d'accomplir sans effort des tâches de production de haute précision, améliorant ainsi la cohérence et l'assurance qualité du processus de production.
En cas de panne de courant imprévue, le robot engage rapidement son frein électromagnétique dans un délai de 18 ms et assure le maintien de sa position dans un délai de 1 mm, le protégeant ainsi contre les dommages à l'équipement ou au produit.
Communiquez avec De nombreuses interfaces standards pour réduire les coûts d'application
Nos robots ont un nombre accru de 24 interfaces DI et DO, prenant en charge la commutation PNP et NPN. Ils sont également configurés avec plus de 30 fonctions pour le contrôle des robots et le retour d’état, offrant commodité et flexibilité pour une intégration et un contrôle transparents dans le domaine de l’automatisation industrielle.
De plus, nos robots sont équipés de méthodes de communication standard telles que Modbus TCP/RTU, EtherNet/IP, PROFINET et autres. Cela garantit une intégration sans effort avec les automates, IHM et autres appareils courants, éliminant ainsi les soucis liés à la compatibilité des protocoles de communication et permettant une intégration et une configuration des appareils plus efficaces et rationalisées.
24
Interfaces DI et DO
PNP et NPN
Commutation prise en charge
Modbus TCP/RTU
EtherNet/IP
PROFINET
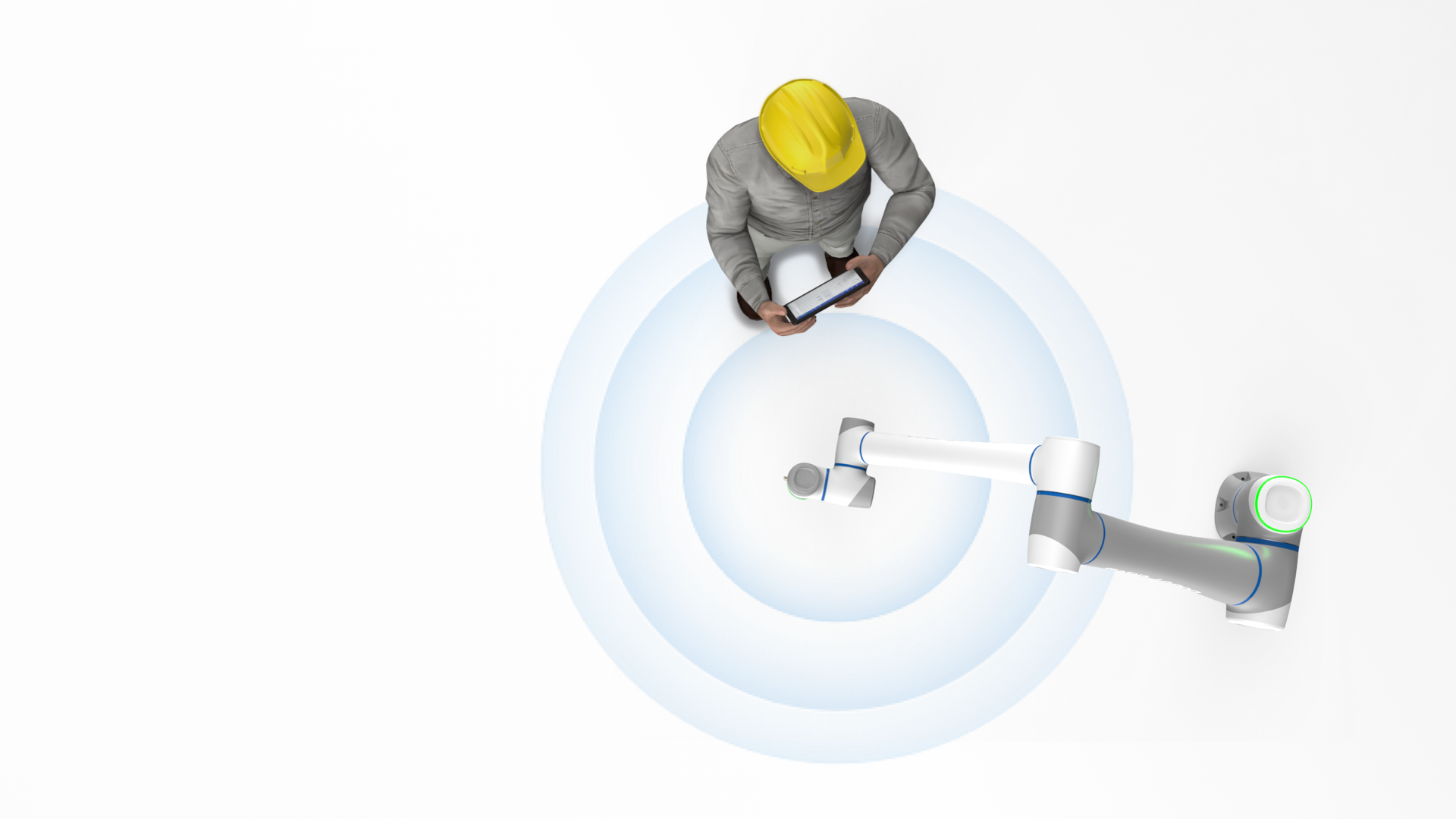
SafeSkin
Produit en série exclusif
peau sûre dans l'industrie
La détection précollision améliore la sécurité et l’efficacité des robots
15 cm
Détection précollision
Surveillance rapide
Réponse rapide
1 m/s
Vitesse maximale d’interaction homme-robot
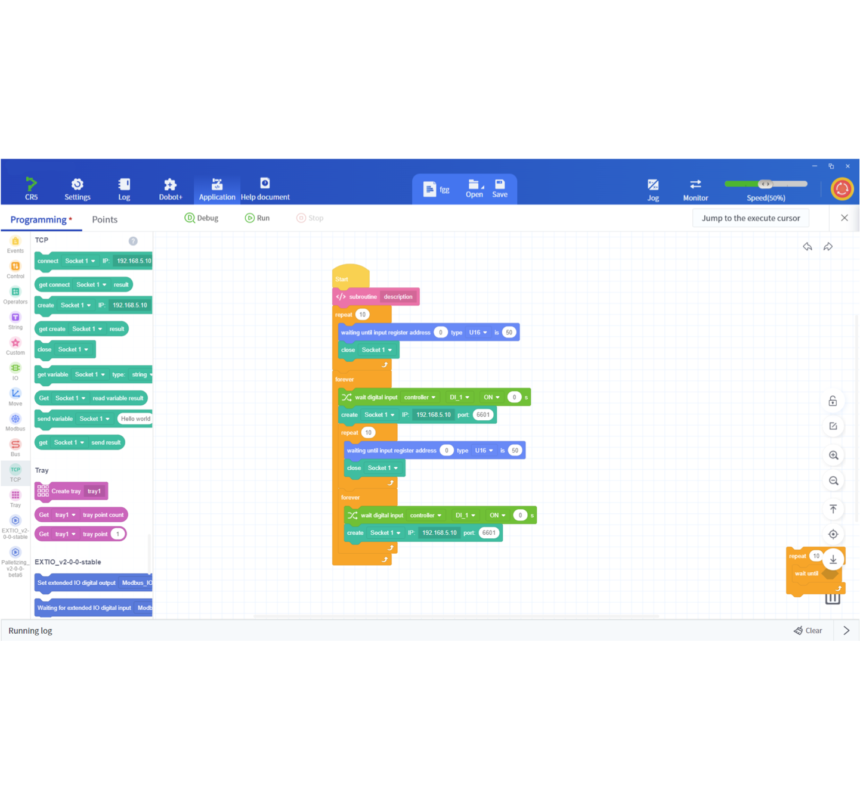
Plateforme logicielle DobotStudio Pro
Simplicité et efficacité
Programmation en bloc
Les blocs offrent une approche de programmation intuitive et conviviale. En combinant ces blocs, vous pouvez créer sans effort des programmes flexibles pour votre robot.
Programmation de scripts
Les développeurs qualifiés peuvent concevoir efficacement des programmes complexes et gérer sans effort des applications avancées grâce à la fourniture d’une programmation de scripts LUA adaptable.
Plugins d'écosystèmes
Une vaste gamme de plugiciels d’écosystème est adaptée à une variété d’accessoires de robots, tels que des pinces, des capteurs de force, une vision 2D/3D, etc. En utilisant directement les API prêtes à l’emploi des plugiciels, les utilisateurs peuvent réaliser efficacement le développement d’applications en peu de temps.
Prise en charge des progiciels de processus
Une gamme de progiciels de processus d’application est offert pour le soudage, la palettisation, la CNC, etc. En ajustant les paramètres, des programmes peuvent être facilement créés, ce qui entraîne des applications robotiques plus rapides. De plus, des progiciels de processus personnalisés et spécialisés peuvent être développés pour des applications spécifiques.
Fonction de journal puissante
Le journal du robot vous permet d’accéder à l’état historique, aux enregistrements d’opérations et aux informations de modification des paramètres à votre convenance. Cela permet une identification rapide des problèmes et minimise les temps d’arrêt.
Contrôleur virtuel
Les utilisateurs peuvent tirer parti de la programmation hors ligne pour exécuter, déboguer et valider des programmes sans être connectés au robot, ce qui accélère la mise en œuvre du projet.
Fonctionnement multiterminal
Différents terminaux (ordinateur, tablette, pendentif d’apprentissage) sont pris en charge. Et les méthodes de connexion filaire ou sans fil peuvent être choisies en fonction de différents scénarios d’utilisation.
Pendentif d'apprentissage
Doté d’un design léger et compact, le pendentif d’apprentissage ARIOROBOTIC combine parfaitement des caractéristiques esthétiques et ergonomiques,
résultant en une prise en main non seulement attrayante mais aussi confortable à tenir.
Sa conception d’interaction exceptionnelle assure sécurité, flexibilité et efficacité accrue dans le débogage du robot, offrant une excellente expérience utilisateur.
ISO Certification de sécurité
Certifié ISO 10218-1:2011 et ISO 13849-1:2015
Avec une résolution allant jusqu’à 1920 x 1280 et un multi-touch qui offre une meilleure expérience pratique
3 – bouton d’activation de position
Peut être configuré comme commutateur d’activation à 3 positions ou bouton glisser-déposer selon les exigences de sécurité
12 bouton de jogging physique
Améliore considérablement l’efficacité de l’enseignement du jogging
* Ceci est un accessoire en option
Pendentif d'apprentissage
Doté d’un design léger et compact, le pendentif d’apprentissage ARIOROBOTIC combine parfaitement des caractéristiques esthétiques et ergonomiques,
résultant en une prise en main non seulement attrayante mais aussi confortable à tenir.
Sa conception d’interaction exceptionnelle assure sécurité, flexibilité et efficacité accrue dans le débogage du robot, offrant une excellente expérience utilisateur.
2.5D
to start a vision application
Can be configured as a 3-position enable switch or drag-and-drop button according to safety requirements
Greatly improve the efficiency of jog teaching
* This is an optional accessory
Série ARC